3.2 Algoritmos de descenso y búsqueda de línea en Unconstrained Convex Optimization (UCO)
Contents
3.2 Algoritmos de descenso y búsqueda de línea en Unconstrained Convex Optimization (UCO)#
Notas para contenedor de docker:
Comando de docker para ejecución de la nota de forma local:
nota: cambiar <ruta a mi directorio> por la ruta de directorio que se desea mapear a /datos dentro del contenedor de docker y <versión imagen de docker> por la versión más actualizada que se presenta en la documentación.
docker run --rm -v <ruta a mi directorio>:/datos --name jupyterlab_optimizacion -p 8888:8888 -d palmoreck/jupyterlab_optimizacion:<versión imagen de docker>
password para jupyterlab: qwerty
Detener el contenedor de docker:
docker stop jupyterlab_optimizacion
Documentación de la imagen de docker palmoreck/jupyterlab_optimizacion:<versión imagen de docker> en liga.
Nota generada a partir de liga.
Al final de esta nota la comunidad lectora:
Comprenderá el uso de la información de primer y segundo orden para resolver problemas small scale de minimización de funciones convexas mediante los algoritmos general de descenso y de búsqueda de línea por backtracking.
Aprenderá la importancia y relación con ecuaciones no lineales al resolver los problemas que involucran aproximar mínimos locales de funciones.
En esta nota consideramos problemas de optimización small scale sin restricciones. Aunque el término small scale es ambiguo pues depende la máquina en la que se realice el cómputo e involucra el número de variables o parámetros y cantidad de almacenamiento para datos, tomamos como small scale aquel problema de optimización sin restricciones en el que se tiene un número de variables del orden menor o igual a \(10^3\).
Los problemas de optimización sin restricciones, Unconstrained Optimization (UO), son de la forma:
con \(f_o:\mathbb{R}^n \rightarrow \mathbb{R}\) función objetivo.
Comentario
Si la función objetivo es convexa se le nombra problema de optimización convexa sin restricciones,Unconstrained Convex Optimization (UCO).
Ejemplos de problemas de optimización small scale#
En optimización la búsqueda del (o los) óptimo(s) involucran el cálculo de información de primer o segundo orden, ver Definición de función, continuidad y derivada, de la función \(f_o\) de acuerdo a lo revisado en los resultados útiles. Tal información para problemas small scale es calculada utilizando todos los datos en un enfoque por batch o lote.
Ejemplo#
import numpy as np
import sympy
from sympy.tensor.array import derive_by_array
import matplotlib.pyplot as plt
from scipy.optimize import fsolve
from scipy.optimize import fmin
import pandas as pd
import cvxpy as cp
from pytest import approx
np.set_printoptions(precision=3, suppress=True)
Los candidatos a ser mínimos los encontramos al calcular el gradiente de \(f_o\) que podemos calcular con SymPy
x1, x2 = sympy.symbols("x1, x2")
fo_sympy = x1**4+2*x1**2*x2+x2**2
sympy.pprint(fo_sympy)
4 2 2
x₁ + 2⋅x₁ ⋅x₂ + x₂
gf = derive_by_array(fo_sympy, (x1, x2))
sympy.pprint(gf)
⎡ 3 2 ⎤
⎣4⋅x₁ + 4⋅x₁⋅x₂ 2⋅x₁ + 2⋅x₂⎦
y plantear:
la cual es una ecuación de dos variables y dos incógnitas no lineal. Resolviendo para \(x_2\) se obtiene la relación: \(x_2 = -x_1^2\). Entonces todos los puntos con coordenadas \(x = (x_1, x_2)\) que satisfacen tal relación cumplen \(\nabla f_o(x) = 0\). ¿Todos serán mínimos locales?
Gráfica de la superficie \(f_o\)
def fo_numpy(x):
return x[0]**4 + 2*x[0]**2*x[1] + x[1]**2
x1_plot,x2_plot = np.meshgrid(np.linspace(-2,2,100), np.linspace(-2,2,100))
z_plot = x1_plot**4 + 2*x1_plot**2*x2_plot + x2_plot**2
x1_np = 0
x2_np = 0
z_np = fo_numpy([x1_np, x2_np])
point = (x1_np, x2_np, z_np)
print(point)
(0, 0, 0)
# Create the figure
fig = plt.figure()
# Add an axes
ax = fig.gca(projection='3d')
ax.plot_surface(x1_plot, x2_plot, z_plot, alpha=0.2)
ax.scatter(point[0], point[1], point[2], color='green')
plt.title("$f_o(x) = x_1^4+2x_1^2x_2+x_2^2$")
plt.show()
/tmp/ipykernel_98/2605078092.py:4: MatplotlibDeprecationWarning: Calling gca() with keyword arguments was deprecated in Matplotlib 3.4. Starting two minor releases later, gca() will take no keyword arguments. The gca() function should only be used to get the current axes, or if no axes exist, create new axes with default keyword arguments. To create a new axes with non-default arguments, use plt.axes() or plt.subplot().
ax = fig.gca(projection='3d')

Gráfica de las curvas de nivel de \(f_o\)
x1_plot,x2_plot = np.meshgrid(np.linspace(-2,2,100), np.linspace(-4, 1,100))
z_plot = x1_plot**4 + 2*x1_plot**2*x2_plot + x2_plot**2
plt.contour(x1_plot,x2_plot,z_plot)
plt.scatter(point[0], point[1], color="green")
plt.title("Curvas de nivel de $f_o$")
plt.show()

Resolvamos con scipy.optimize.fsolve la ecuación no lineal \(\nabla f_o(x) = 0\)
def eqn(x):
x1,x2=x
return [4*x1**3+4*x1*x2, 2*x1**2+2*x2]
root1 = fsolve(eqn, (1, 1))
root2 = fsolve(eqn, (-1, 1))
root3 = fsolve(eqn, (2, 0))
dic_roots = {"root1": root1,
"root2": root2,
"root3": root3}
print(pd.DataFrame(dic_roots))
root1 root2 root3
0 1.0 -1.0 2.0
1 -1.0 -1.0 -4.0
Al evaluar el gradiente en cada punto obtenemos cero (o cercano a cero):
gf_eval = lambda x: np.array([partial_derivative.subs({"x1": x[0],
"x2": x[1]}) for partial_derivative in gf],
dtype=float)
dic = {"root1": gf_eval(root1),
"root2": gf_eval(root2),
"root3": gf_eval(root3)}
print(pd.DataFrame(dic).round(3))
root1 root2 root3
0 0.0 0.0 0.0
1 0.0 -0.0 0.0
¿Cómo podemos identificar si son mínimos? … usamos la Hessiana de \(f_o\)
Hf = derive_by_array(gf, (x1, x2))
sympy.pprint(Hf)
⎡ 2 ⎤
⎢12⋅x₁ + 4⋅x₂ 4⋅x₁⎥
⎢ ⎥
⎣ 4⋅x₁ 2 ⎦
y revisamos eigenvalores de la Hessiana evaluada en los puntos root1, root2, root3
Hf_eval = lambda x: np.array([second_partial_derivative.subs({"x1": x[0],
"x2": x[1]}) for second_partial_derivative in Hf],
dtype=float)
Hf_root1 = Hf_eval(root1)
Hf_root2 = Hf_eval(root2)
Hf_root3 = Hf_eval(root3)
print(np.linalg.eigvals(Hf_root1))
[10. 0.]
print(np.linalg.eigvals(Hf_root2))
[10. -0.]
print(np.linalg.eigvals(Hf_root3))
[34. 0.]
Tenemos un criterio para \(2\) dimensiones:
Comentario
Sea \(f \in \mathcal{C}^2(\text{intdom}f)\), \(\det(\nabla^2 f(x))\) determinante de la Hessiana y \(x \in \mathbb{R}^2\) un punto crítico o estacionario de \(f\):
Si \(\frac{\partial^2f(x)}{\partial x_1^2} < 0\) y \(\det(\nabla^2 f(x)) >0\) entonces \(f\) tiene un máximo local en \(x\).
Si \(\frac{\partial^2f(x)}{\partial x_1^2} > 0\) y \(\det(\nabla^2 f(x)) >0\) entonces \(f\) tiene un mínimo local en \(x\).
Si \(\det(\nabla^2 f(x)) < 0\) entonces \(f\) tiene un punto silla o saddle point en \(x\).
Si \(\det(\nabla^2 f(x)) = 0\) no podemos concluir si \(x\) es extremo.
Observaciones
Al determinante de la Hessiana de \(f\) se le nombra Hessiano de \(f\).
Lo anterior es un caso particular de los resultados descritos en sobre puntos críticos.
En el ejemplo el Hessiano es:
sympy.pprint(sympy.Matrix(Hf).det())
2
8⋅x₁ + 8⋅x₂
El cual se anula justo en los puntos que cumplen: \(x_2 = -x_1^2\)
\(8x_1^2 + 8x_2 = 8 x_1^2 + 8(-x_1^2) = 0\)
por lo que no podemos concluir…
Usemos una función de SciPy scipy.optimize.fmin
res_fmin = fmin(fo_numpy, [1,1])
Optimization terminated successfully.
Current function value: 0.000000
Iterations: 56
Function evaluations: 110
print(res_fmin)
[-0.063 -0.004]
print(gf_eval(res_fmin))
[-0. 0.]
Hf_fmin = Hf_eval(res_fmin)
print(np.linalg.eigvals(Hf_fmin))
[0. 2.032]
Grafiquemos los puntos que cumplen \(x_2=-x_1^2\)
x1_plot,x2_plot = np.meshgrid(np.linspace(-2,2,100), np.linspace(-4,2,100))
z_plot = x1_plot**4 + 2*x1_plot**2*x2_plot + x2_plot**2
point1 = (root1[0], root1[1], fo_numpy(root1))
point2 = (root2[0], root2[1], fo_numpy(root2))
point3 = (root3[0], root3[1], fo_numpy(root3))
#another point:
point4 = (-2, -4, 0)
x1_plot2 = np.linspace(-2,2,100)
# Create the figure
fig = plt.figure()
# Add an axes
ax = fig.gca(projection='3d')
ax.plot_surface(x1_plot, x2_plot, z_plot, alpha=0.2)
ax.scatter(point[0], point[1], point[2], color='green')
ax.scatter(point1[0], point1[1], point1[2], color='green')
ax.scatter(point2[0], point2[1], point2[2], color='green')
ax.scatter(point3[0], point3[1], point3[2], color='green')
ax.scatter(point4[0], point4[1], point4[2], color='green')
ax.plot(x1_plot2, -x1_plot2**2, color="red")
plt.title("$f_o(x) = x_1^4+2x_1^2x_2+x_2^2$")
plt.show()
/tmp/ipykernel_98/1979884310.py:4: MatplotlibDeprecationWarning: Calling gca() with keyword arguments was deprecated in Matplotlib 3.4. Starting two minor releases later, gca() will take no keyword arguments. The gca() function should only be used to get the current axes, or if no axes exist, create new axes with default keyword arguments. To create a new axes with non-default arguments, use plt.axes() or plt.subplot().
ax = fig.gca(projection='3d')

Evaluemos en un rango más amplio la función objetivo \(f_o\) y realicemos una gráfica
x1_plot,x2_plot = np.meshgrid(np.linspace(-100,100,100), np.linspace(-100,100,100))
z_plot = x1_plot**4 + 2*x1_plot**2*x2_plot + x2_plot**2
# Create the figure
fig = plt.figure()
# Add an axes
ax = fig.gca(projection='3d')
ax.plot_surface(x1_plot, x2_plot, z_plot, alpha=0.2)
plt.title("$f_o(x) = x_1^4+2x_1^2x_2+x_2^2$")
plt.show()
/tmp/ipykernel_98/125119981.py:4: MatplotlibDeprecationWarning: Calling gca() with keyword arguments was deprecated in Matplotlib 3.4. Starting two minor releases later, gca() will take no keyword arguments. The gca() function should only be used to get the current axes, or if no axes exist, create new axes with default keyword arguments. To create a new axes with non-default arguments, use plt.axes() or plt.subplot().
ax = fig.gca(projection='3d')

np.sum(z_plot < 0)
0
El mínimo valor de \(f_o\) es \(0\) por lo que tenemos un conjunto de mínimos dados por la curva \(x_2=-x_1^2\).
¿Por qué fue un poco complicado determinar el conjunto de mínimos de \(f_o\)?#
\(f_o(x)=x_1^4+2x_1^2x_2+x_2^2\) no es una función convexa en su \(\text{dom}f_o\), \(\mathbb{R}^2\), esto es, no satisface la desigualdad:
\(\forall x,y\) en su dominio y \(\forall \theta \in [0,1]\).
pointx = np.array([-.5, -1.5])
pointy = np.array([.5, -1.5])
theta = 1/2
point_convex_combination = theta*pointx + (1-theta)*pointy
print(fo_numpy(point_convex_combination))
2.25
print(theta*fo_numpy(pointx) + (1-theta)*fo_numpy(pointy))
1.5625
Observación
Recordar que si \(f_o\) es una función convexa, el gradiente de \(f_o\) nos ayuda a determinar si un punto es un mínimo local de forma necesaria y suficiente.
Ejercicio
Realizar un análisis similar al anterior para la función \(f_o(x) = x_2^4+2x_2^2x_1^2+x_1^2\).
Ejemplo importante#
donde: \(P=\left [\begin{array}{cc} 5 & 4\\ 4 & 5 \end{array} \right ]\), \(q=\left [\begin{array}{c} -1\\ 1 \end{array} \right]\), \(r=3\).
Haciendo las multiplicaciones de matriz-vector y productos punto
P = sympy.Matrix([[5, 4],
[4, 5]])
x = sympy.Matrix(sympy.symbols("x1, x2"))
q = sympy.Matrix([-1,1])
r = 3
fo_sympy = (1/2*x.T*P*x + q.T*x)[0] + r
sympy.pprint(fo_sympy.expand())
2 2
2.5⋅x₁ + 4.0⋅x₁⋅x₂ - x₁ + 2.5⋅x₂ + x₂ + 3
se reescribe el problema de optimización como:
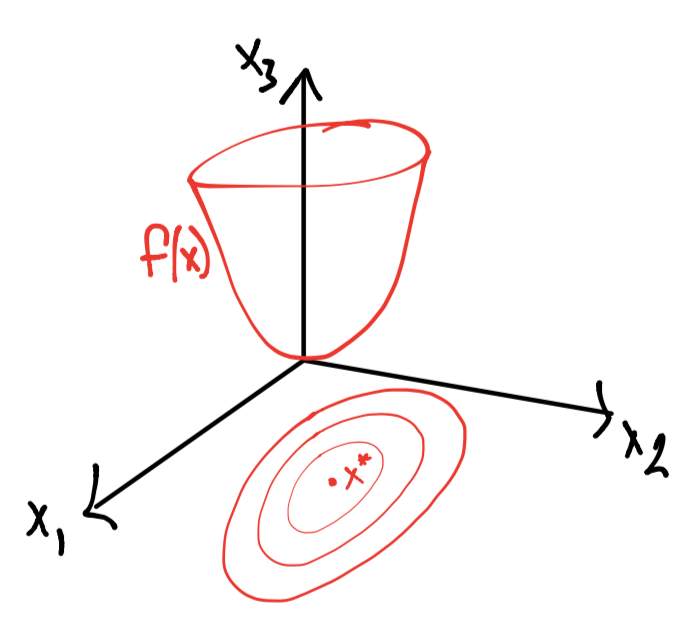
La función objetivo es una función estrictamente convexa en \(\mathbb{R}^2\) (de hecho fuertemente convexa) pues:
sympy.pprint(P.eigenvals())
{1: 1, 9: 1}
y la Hessiana de \(f_o\) es:
sympy.pprint(derive_by_array(derive_by_array(fo_sympy, (x1,x2)),
(x1,x2))
)
⎡5.0 4.0⎤
⎢ ⎥
⎣4.0 5.0⎦
El gradiente de \(f_o\) es:
sympy.pprint(fo_sympy.diff(x))
⎡5.0⋅x₁ + 4.0⋅x₂ - 1⎤
⎢ ⎥
⎣4.0⋅x₁ + 5.0⋅x₂ + 1⎦
El mínimo debe satisfacer la ecuación lineal con dos variables y dos ecuaciones
Observación
En algunos casos especiales es posible resolver la ecuación no lineal \(\nabla f_o(x) = 0\) para \(x\) de forma analítica o cerrada. Este es el caso de este ejemplo cuya solución está dada por \(x^* = -P^{-1}q\).
P = np.array([[5,4],[4,5]])
q = np.array([-1,1])
print(np.linalg.solve(P,-q))
[ 1. -1.]
El problema anterior también lo podemos resolver con cvxpy pues es un problema convexo.
n = 2 #number of variables
x = cp.Variable(n) #optimization variable
fo_cvxpy = (1/2)*cp.quad_form(x, P) + q.T @ x + r#objective function
opt_objective = cp.Minimize(fo_cvxpy) #optimization objective
prob = cp.Problem(opt_objective) #optimization problem
print(prob.solve())
2.0
print("status:", prob.status)
print("optimal value", prob.value)
print("optimal var", x.value)
status: optimal
optimal value 2.0
optimal var [ 1. -1.]
Observaciones
El paquete cvxpy requiere que se especifique el problema de optimización a resolver siguiendo reglas establecidas en Disciplined Convex Programming. En el ejemplo anterior resulta en un error si se ejecutan las líneas siguientes:
x1 = cp.Variable()
x2 = cp.Variable()
fo = 2.5*x1**2 + 4*x1*x2 - x1 + 2.5*x2**2 + x2 + 3
obj = cp.Minimize(fo)
prob = cp.Problem(obj)
prob.solve()
La última línea produce
Problem does not follow DCP rules. Specifically: The objective is not DCP.
En la liga de ejemplos hay muchos problemas típicos en optimización convexa y en Atomic Functions ejemplos de funciones atómicas que pueden aplicarse a expresiones de CVXPY.
Ejercicio
Utilizando las herramientas (teóricas y prácticas) del ejemplo anterior, resolver el problema de optimización:
con \(A=\left [ \begin{array}{ccc} 1 & 6 & 2.5\\ 1 & 2 & 8 \\ 1 & 10 & -1\\ 1 & -9 & 3\\ 1 & -1 & 2 \end{array} \right ]\), \(b=\left [ \begin{array}{c} -1 \\ 0 \\ 2 \\ 3.5 \\ -1.7 \end{array} \right ]\).
Métodos de descenso#
Los ejemplos anteriores mostraron la importancia de la información de primer y segundo orden de la función objetivo \(f_o\) y las ecuaciones no lineales para resolver el problema de optimización. El primer ejemplo utilizó las funciones scipy.optimize.fsolve y scipy.optimize.fmin para este propósito. Tales funciones utilizan métodos iterativos para resolver ecuaciones no lineales y aproximar un mínimo local respectivamente en un esquema que para el caso de minimización satisface:
con \(x^{(0)}\) punto inicial.
Los métodos que utilizan esquemas iterativos para calcular una secuencia de minimización de puntos \(x^{(0)}, x^{(1)}, \dots \in \text{dom}f_o\) con la característica \(f_o(x^{(k)}) \rightarrow p^*\) si \(k \rightarrow \infty\) se conocen con el nombre de métodos de descenso.
Definición
Un método de descenso es aquel que genera la secuencia de minimización \(x^{(0)}, x^{(1)}, \dots \in \text{dom}f_o\) la cual cumple con la desigualdad: \(f_o(x^{(k+1)}) < f_o(x^{(k)})\) excepto para \(x^{(k)}\) óptimo y \(f_o(x^{(k)}) \rightarrow p^*\) si \(k \rightarrow \infty\).
La secuencia de minimización en un método de descenso se genera con la expresión:
donde: \(\Delta x\) es dirección de búsqueda que es de descenso.
Observaciones
La definición de una dirección de descenso anterior aplica para funciones en general, no es necesario que \(f_o\) sea convexa.
En la práctica la secuencia de minimización involucra calcular un tamaño o longitud de paso que ayuda a la convergencia del método. Se tienen diferentes metodologías para su cálculo y más adelante se describe una de ellas.
Comentario
Asumiendo que la función \(f_o\) es convexa, típicamente se asume lo siguiente para tener métodos iterativos confiables y exactos:
Los puntos iniciales \(x^{(0)}\) están en \(\text{dom}f_o\).
Que el conjunto \(f_o(x^{(0)})\)-subnivel sea cerrado pues así se garantiza que la secuencia de minimización está en el conjunto \(f_o(x^{(0)})\)-subnivel para todas las iteraciones.
\(f_o\) fuertemente convexa en el conjunto \(f_o(x^{(0)})\)-subnivel para tener propiedades dadas en los resultados que son posibles probar para funciones fuertemente convexas.
En lo siguiente se asume que \(f_o\) cumple \(f_o \in \mathcal{C}^2(\text{dom}f_o)\) y es convexa en un conjunto convexo y cerrado que contiene a \(x^*\). Ver conjunto abierto, cerrado, cerradura e interior para definición de conjunto cerrado.
Ejemplo de función objetivo convexa#
Encontrar el mínimo del siguiente problema con un método iterativo.
x1, x2, x3, x4 = sympy.symbols("x1, x2, x3, x4")
fo_sympy = (x1-2)**2 + (2-x2)**2 + x3**2 + x4**4
gf = derive_by_array(fo_sympy, (x1, x2, x3, x4))
sympy.pprint(gf)
⎡ 3⎤
⎣2⋅x₁ - 4 2⋅x₂ - 4 2⋅x₃ 4⋅x₄ ⎦
Hf = derive_by_array(gf, (x1, x2, x3, x4))
sympy.pprint(Hf)
⎡2 0 0 0 ⎤
⎢ ⎥
⎢0 2 0 0 ⎥
⎢ ⎥
⎢0 0 2 0 ⎥
⎢ ⎥
⎢ 2⎥
⎣0 0 0 12⋅x₄ ⎦
Como \(f_o\) es una función convexa (de hecho estrictamente convexa) en su dominio \(\mathbb{R}^4\), se tiene que su óptimo se obtiene igualando y resolviendo la ecuación no lineal \(\nabla f_o(x) = 0\) :
El óptimo \(x^* \in \mathbb{R}^4\) está dado por:
¿Cómo encontramos numéricamente el óptimo con un método iterativo?
Condición para que un paso o dirección de búsqueda sea de descenso#
La idea de los métodos de optimización es calcular direcciones \(\Delta x\) de búsqueda que sean de descenso, esto es, que al movernos de un punto a otro en tal dirección, el valor de \(f_o\) decrece. Existen muchas direcciones de descenso (de hecho infinitas) una que se muestra en el dibujo siguiente es la dirección de descenso de Newton \(\Delta x_{nt}\):
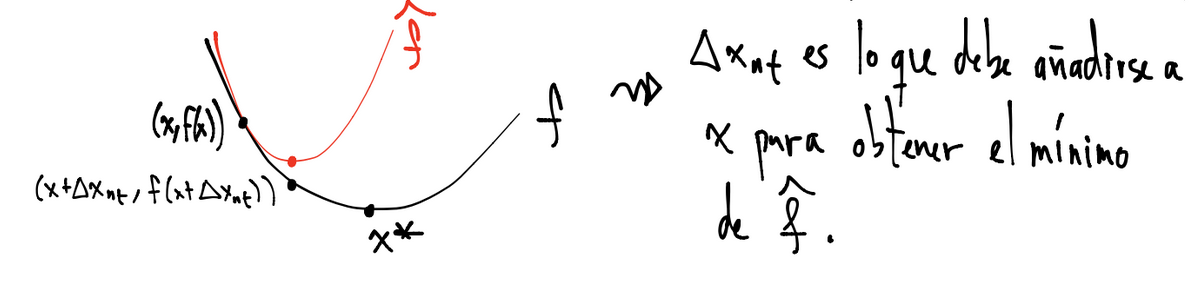
En el dibujo \(f = f_o\) y \(\hat{f}\) es un modelo cuadrático. Del punto \((x,f(x))\) nos debemos mover al punto \((x+\Delta x_{nt}, f(x + \Delta x_{nt}))\) para llegar al óptimo. En tal dirección \(f\) decrece: \(f(x+\Delta x_{nt}) < f(x)\) y obsérvese que \(\Delta x_{nt}\) es mínimo de \(\hat{f}\).
Comentario
El modelo cuadrático del dibujo anterior está dado por la aproximación de segundo orden a la función \(f_o\) por el teorema de Taylor con centro en \(x\):
con único mínimo si \(\nabla ^2 f_o(x) \in \mathbb{S}^n_{++}\) dado por \(v^* = \Delta x_{nt}\) y \(\Delta x_{nt}\) dirección de Newton cuya expresión está más adelante. En cada iteración se construye un modelo cuadrático:
Geométricamente las direcciones de descenso forman un ángulo agudo con \(-\nabla f_o(x)\):
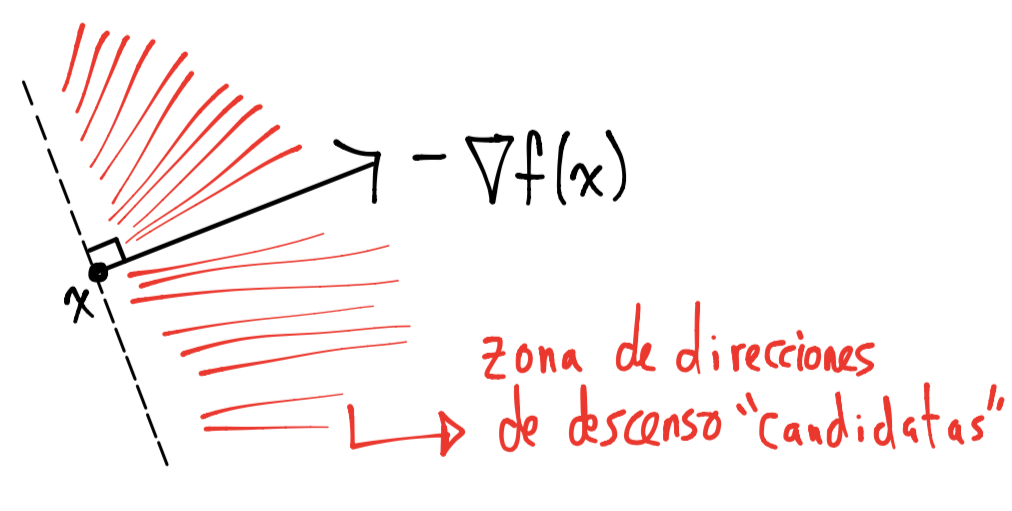
En el dibujo \(f = f_o\).
Observación
Aunque se tienen una cantidad infinita de direcciones de descenso, las direcciones de descenso que típicamente son elegidas no son cercanas a ser ortogonales con el gradiente de \(f_o\).
Tenemos una condición para garantizar que una dirección sea de descenso:
Definición
Si el paso o dirección de búsqueda satisface: \(\nabla f_o(x)^T\Delta x < 0\) se le nombra dirección de descenso.
Comentarios
Recuérdese que \(\nabla f_o(x)^T \Delta x\) es una derivada direccional de \(f_o\) en \(x\) en la dirección \(\Delta x\), ver ejemplo función restringida a una línea.
La definición anterior se justifica pues recuérdese que por la aproximación del teorema de Taylor a primer orden se tiene:
y si \(\Delta x\) es dirección de descenso entonces: \(f_o(x) + \nabla f_o(x) ^T \Delta x < f_o(x)\).
Observación
Obsérvese que si \(x^*\) es mínimo local entonces \(\nabla f_o(x^*) = 0\) (condición necesaria de primer orden) por lo que no existen direcciones de descenso.
Ejemplos de direcciones de descenso#
\(\Delta x = - \nabla f_o \left (x^{(k)} \right )\) que da lugar al método de descenso en gradiente para \(x^{(k)}\) no óptimo.
\(\Delta x = - \nabla^2 f_o \left (x^{(k)} \right )^{-1} \nabla f_o\left(x^{(k)} \right)\) que da lugar al método de descenso por Newton con \(\nabla^2 f_o \left (x^{(k)} \right ) \in \mathbb{S}^n_{++}\) y \(x^{(k)}\) no óptimo.
\(\Delta x = - H_k ^{-1} \nabla f_o\left(x^{(k)}\right)\) con \(H_k\) aproximación a la Hessiana de \(f_o\) con \(\nabla^2 f_o \left (x^{(k)} \right ) \in \mathbb{S}^n_{++}\) y \(x^{(k)}\) no óptimo.
Observaciones
La definición de una dirección de descenso aplica para funciones en general, no es necesario que \(f_o\) sea convexa.
Para funciones en general, la dirección de Newton es de descenso si la Hessiana es definida positiva y análogamente para las direcciones en las que se utilicen aproximaciones a la Hessiana. Esto asegura que el modelo cuadrático tenga un único mínimo y que \(f_o\) decrezca su valor en tal dirección.
Comúnmente los métodos que utilizan aproximaciones a la Hessiana se conocen con el nombre de métodos Cuasi-Newton, ver Quasi-Newton_method.
Continuando con el ejemplo anterior#
Encontrar el mínimo del siguiente problema con un método iterativo.
Opción descenso en gradiente: usando la dirección del gradiente de \(f_o\) se tiene:
Tomando \(x^{(0)} = \left [ \begin{array}{c} 5 \\ 5 \\1 \\ 0.1 \\ \end{array} \right ]\) como punto inicial:
x_0 = np.array([5,5,1,0.1])
f_o_np = lambda x: (x[0]-2)**2 + (2-x[1])**2 + x[2]**2 + x[3]**2
print(f_o_np(x_0))
19.01
gf_eval = lambda x: np.array([partial_derivative.subs({"x1": x[0],
"x2": x[1],
"x3": x[2],
"x4": x[3]}) for partial_derivative in gf],
dtype=float)
print(gf_eval(x_0))
[6. 6. 2. 0.004]
print(gf_eval(x_0).dot(-gf_eval(x_0)))
-76.000016
Primera iteración
x_1 = x_0 - gf_eval(x_0)
print(x_1)
[-1. -1. -1. 0.096]
print(f_o_np(x_0))
19.01
print(f_o_np(x_1))
19.009216
Obsérvese que la aproximación a primer orden por Taylor no es correcta: \(f_o(x_0 + \Delta x) \neq f_o(x_0) + \nabla f_o(x_0)^T \Delta x\).
print(f_o_np(x_0) + gf_eval(x_0).dot(-gf_eval(x_0)))
-56.990016
Segunda iteración
print(gf_eval(x_1))
[-6. -6. -2. 0.004]
print(gf_eval(x_1).dot(-gf_eval(x_1)))
-76.00001252412463
x_2 = x_1 - gf_eval(x_1)
print(x_2)
[5. 5. 1. 0.092]
print(f_o_np(x_1))
19.009216
print(f_o_np(x_2))
19.008549046876634
Obsérvese que la aproximación a primer orden por Taylor no es correcta: \(f_o(x_1 + \Delta x) \neq f_o(x_1) + \nabla f_o(x_1)^T \Delta x\).
print(f_o_np(x_1) + gf_eval(x_1).dot(-gf_eval(x_1)))
-56.99079652412463
Tercera iteración
x_3 = x_2 - gf_eval(x_2)
print(x_1)
[-1. -1. -1. 0.096]
print(x_3)
[-1. -1. -1. 0.089]
Cuarta iteración
x_4 = x_3 - gf_eval(x_3)
print(x_2)
[5. 5. 1. 0.092]
print(x_4)
[5. 5. 1. 0.086]
y así nos quedaremos ciclando por muchas iteraciones…
Comentario
El método de descenso en gradiente para el ejemplo anterior no convergerá al óptimo \(x^* = \left [ \begin{array}{c} 2 \\ 2 \\0 \\ 0 \\ \end{array} \right ]\)
Ejercicio
¿Converge el método de descenso en gradiente al óptimo para un punto inicial \(x^{(0)} = \left [ \begin{array}{c} 2.5 \\ 2.5 \\0.001 \\ 0.001 \\ \end{array} \right ]\)?
Opción descenso por dirección de Newton: usando la dirección de descenso de Newton de \(f_o\) se tiene:
Con
Tomando \(x^{(0)} = \left [ \begin{array}{c} 5 \\ 5 \\1 \\ 0.1 \\ \end{array} \right ]\) como punto inicial y no calculando la inversa de la Hessiana pues en su lugar resolvemos el sistema de ecuaciones lineales \(\nabla ^2 f_o \left ( x^{(k)} \right ) \Delta x = - \nabla f_o \left(x^{(k)}\right )\) resulta
x_0 = np.array([5,5,1,0.1])
Hf_eval = lambda x: np.array([second_partial_derivative.subs({"x1": x[0],
"x2": x[1],
"x3": x[2],
"x4": x[3]}) for second_partial_derivative in Hf],
dtype=float)
Hf_sympy_eval = sympy.Matrix(Hf_eval(x_0))
sympy.pprint(Hf_sympy_eval)
⎡2.0 0.0 0.0 0.0 ⎤
⎢ ⎥
⎢0.0 2.0 0.0 0.0 ⎥
⎢ ⎥
⎢0.0 0.0 2.0 0.0 ⎥
⎢ ⎥
⎣0.0 0.0 0.0 0.12⎦
gf_sympy_eval = gf_eval(x_0)
sympy.pprint(gf_sympy_eval)
[6. 6. 2. 0.004]
El sistema de ecuaciones lineales a resolver es:
Resolviendo con NumPy el sistema de ecuaciones lineales:
Hf_np_eval = np.array(Hf_sympy_eval, dtype=float)
_, n = Hf_np_eval.shape
gf_np_eval = np.array(gf_sympy_eval, dtype = float)
gf_np_eval
array([6. , 6. , 2. , 0.004])
dir_Newton = np.linalg.solve(Hf_np_eval, -gf_np_eval)
print(dir_Newton)
[-3. -3. -1. -0.033]
print(gf_np_eval.dot(dir_Newton))
-38.00013333333333
Primera iteración
x_1 = x_0 + dir_Newton
print(x_1)
[2. 2. 0. 0.067]
Recuérdese que siempre es útil monitorear el número de condición de la matriz del sistema de ecuaciones lineales que en este caso es la Hessiana de \(f_o\) en \(x^{(0)}\) para confiabilidad de nuestros cálculos al resolver el sistema de ecuaciones lineales asociado, ver Número de condición de una matriz:
print(np.linalg.cond(Hf_np_eval))
16.666666666666664
print(f_o_np(x_0))
19.01
print(f_o_np(x_1))
0.004444444444444446
Obsérvese que la aproximación a segundo orden por Taylor es cercana: \(f_o(x_0 + \Delta x) \approx f_o(x_0) + \nabla f_o(x_0)^T \Delta x + \frac{1}{2}\Delta x ^T\nabla^2 f_o(x_0) \Delta x\).
print(f_o_np(x_0) + gf_np_eval.dot(dir_Newton) + 1/2*dir_Newton.dot(Hf_np_eval@dir_Newton))
0.009933333333336236
Segunda iteración
Hf_sympy_eval = sympy.Matrix(Hf_eval(x_1))
gf_sympy_eval = gf_eval(x_1)
Hf_np_eval = np.array(Hf_sympy_eval, dtype=float)
gf_np_eval = np.array(gf_sympy_eval, dtype = float)
dir_Newton = np.linalg.solve(Hf_np_eval, -gf_np_eval)
x_2 = x_1 + dir_Newton
print(x_2)
[2. 2. 0. 0.044]
print(gf_np_eval.dot(dir_Newton))
-2.6337448559670797e-05
print(f_o_np(x_1))
0.004444444444444446
print(f_o_np(x_2))
0.0019753086419753096
Obsérvese que la aproximación a segundo orden por Taylor es cercana: \(f_o(x_1 + \Delta x) \approx f_o(x_1) + \nabla f_o(x_1)^T \Delta x + \frac{1}{2}\Delta x ^T\nabla^2 f_o(x_1) \Delta x\).
print(f_o_np(x_1) + gf_np_eval.dot(dir_Newton) + 1/2*dir_Newton.dot(Hf_np_eval@dir_Newton))
0.004431275720164611
print(np.linalg.cond(Hf_np_eval))
37.499999999999986
Tercera iteración
Hf_sympy_eval = sympy.Matrix(Hf_eval(x_2))
gf_sympy_eval = gf_eval(x_2)
Hf_np_eval = np.array(Hf_sympy_eval, dtype=float)
gf_np_eval = np.array(gf_sympy_eval, dtype = float)
dir_Newton = np.linalg.solve(Hf_np_eval, -gf_np_eval)
x_3 = x_2 + dir_Newton
print(x_3)
[2. 2. 0. 0.03]
print(gf_np_eval.dot(dir_Newton))
-5.202458974749789e-06
print(f_o_np(x_2))
0.0019753086419753096
print(f_o_np(x_3))
0.0008779149519890264
Obsérvese que la aproximación a segundo orden por Taylor es cercana: \(f_o(x_2 + \Delta x) \approx f_o(x_2) + \nabla f_o(x_2)^T \Delta x + \frac{1}{2}\Delta x ^T\nabla^2 f_o(x_2) \Delta x\).
print(f_o_np(x_2) + gf_np_eval.dot(dir_Newton) + 1/2*dir_Newton.dot(Hf_np_eval@dir_Newton))
0.0019727074124879346
print(np.linalg.cond(Hf_np_eval))
84.37499999999997
Cuarta iteración
Hf_sympy_eval = sympy.Matrix(Hf_eval(x_3))
gf_sympy_eval = gf_eval(x_3)
Hf_np_eval = np.array(Hf_sympy_eval, dtype=float)
gf_np_eval = np.array(gf_sympy_eval, dtype = float)
dir_Newton = np.linalg.solve(Hf_np_eval, -gf_np_eval)
x_4 = x_3 + dir_Newton
print(x_4)
[2. 2. 0. 0.02]
print(gf_np_eval.dot(dir_Newton))
-1.027646217234526e-06
print(f_o_np(x_3))
0.0008779149519890264
print(f_o_np(x_4))
0.00039018442310623393
Obsérvese que la aproximación a segundo orden por Taylor es cercana: \(f_o(x_3 + \Delta x) \approx f_o(x_3) + \nabla f_o(x_3)^T \Delta x + \frac{1}{2}\Delta x ^T\nabla^2 f_o(x_3) \Delta x\).
print(f_o_np(x_3) + gf_np_eval.dot(dir_Newton) + 1/2*dir_Newton.dot(Hf_np_eval@dir_Newton))
0.000877401128880409
print(np.linalg.cond(Hf_np_eval))
189.84374999999991
print(x_4 == approx(np.array([2,2,0,0.0]), abs=1e-1, rel=1e-1))
True
Comentario
El método por dirección de Newton sí convergerá al óptimo \(x^* = \left [ \begin{array}{c} 2 \\ 2 \\0 \\ 0 \\ \end{array} \right ]\) pero la convergencia será lenta.
Si hubiéramos elegido como punto inicial \(x^{(0)} = \left [ \begin{array}{c} 5 \\ 5 \\1 \\ 0 \\ \end{array} \right ]\)
x_0 = np.array([5, 5, 1, 0])
Hf_sympy_eval = sympy.Matrix(Hf_eval(x_0))
sympy.pprint(Hf_sympy_eval)
⎡2.0 0.0 0.0 0.0⎤
⎢ ⎥
⎢0.0 2.0 0.0 0.0⎥
⎢ ⎥
⎢0.0 0.0 2.0 0.0⎥
⎢ ⎥
⎣0.0 0.0 0.0 0.0⎦
gf_sympy_eval = sympy.Matrix(gf_eval(x_0))
sympy.pprint(gf_sympy_eval)
⎡6.0⎤
⎢ ⎥
⎢6.0⎥
⎢ ⎥
⎢2.0⎥
⎢ ⎥
⎣0.0⎦
El sistema de ecuaciones lineales a resolver es:
Obsérvese que la última ecuación es redundante por lo que una solución al sistema anterior es considerar \(x_4=0\) y resolver:
x = sympy.Matrix([x1, x2, x3, x4])
sympy.pprint(sympy.solve(Hf_sympy_eval*x - (-gf_sympy_eval), x))
{x₁: -3.0, x₂: -3.0, x₃: -1.0}
x_1 = x_0 + np.array([-3, -3, -1, 0])
print(x_1)
[2 2 0 0]
sympy.pprint(Hf_sympy_eval.condition_number())
zoo
print(x_1 == approx(np.array([2,2,0,0.0]), abs=1e-4, rel=1e-4))
True
Comentarios
De acuerdo al ejemplo anterior:
Utilizar información de primer o segundo orden nos ayuda a encontrar óptimo(s) de funciones.
El método de descenso en gradiente no converge para el punto inicial elegido. En el caso del método de Newton sí hay convergencia pero es lenta si el punto inicial tiene en la última entrada un número cercano a \(0\).
Una de las ventajas que tiene utilizar la dirección del gradiente vs la dirección de Newton es que el gradiente involucra menos almacenamiento en memoria que el almacenamiento de la Hessiana: \(\mathcal{O}(n)\) vs \(\mathcal{O}(n^2)\).
Resolviendo el problema con CVXPY#
x1 = cp.Variable()
x2 = cp.Variable()
x3 = cp.Variable()
x4 = cp.Variable()
fo_cvxpy = (x1 -2)**2 + (2-x2)**2 + x3**2 + x4**2
obj = cp.Minimize(fo_cvxpy)
prob = cp.Problem(obj)
print(prob.solve())
0.0
print("status:", prob.status)
print("optimal value", prob.value)
print("optimal var", x1.value, x2.value, x3.value, x4.value)
status: optimal
optimal value 0.0
optimal var 2.0 2.0 0.0 0.0
Tamaño o longitud de paso#
En el ejemplo anterior en el que se aproximó al mínimo del siguiente problema con el método de Newton
se concluyó que tal método converge de forma lenta y el método de descenso en gradiente no converge para el punto inicial elegido en ambos métodos. La pequeña reducción que se obtenía en \(f_o\) por cada iteración fue la razón de tal situación en el caso del descenso en gradiente. Una metodología que resuelve la no convergencia del método de descenso en gradiente utiliza el siguiente esquema iterativo:
con \(t^{(k)}>0\).
Comentario
Para el caso del método de Newton, la convergencia cuadrática depende además de elegir tamaños de pasos adecuados que:
las iteraciones vayan aproximándose a \(x^*\),
la función objetivo sea dos veces diferenciable y su Hessiana sea definida positiva en un conjunto abierto que contenga a \(x^*\) y sea Lipschitz continua en tal conjunto, ver Lipschitz_continuity , que ayuda a acotar la diferencia entre \(f_o\) y el modelo cuadrático \(m\).
Continuando con el ejemplo anterior#
Usando el método de descenso en gradiente de \(f_o\) y el esquema iterativo:
con \(t^{(0)} = 0.5\) con punto inicial \(x^{(0)} = \left [ \begin{array}{c} 5 \\ 5 \\1 \\ 0.1 \\ \end{array} \right ]\) se tiene:
x_0 = np.array([5,5,1,0.1])
t_0=0.5
x_1 = x_0 - t_0*gf_eval(x_0)
print(x_1)
[2. 2. 0. 0.098]
print(x_1 == approx(np.array([2,2,0,0.0]), abs=1e-1, rel=1e-1))
True
por lo que llegamos a aproximar al óptimo en una iteración.
Observación
Para problemas small scale el método de Newton o Cuasi-Newton son muy superiores al método de descenso en gradiente. Sin embargo para problemas large scale el método de descenso en gradiente es utilizado ampliamente en aplicaciones de machine learning.
Definición
Al escalar \(t^{(k)}\) se le nombra tamaño o longitud de paso y siempre es positivo salvo en el caso en que \(x^{(k)}\) sea óptimo.
El valor \(t^{(k)}\) se calcula con metodologías como búsqueda de línea o regiones de confianza, ver line search, trust region y en esta nota se revisa la búsqueda de línea con backtracking.
¿Por qué funciona lo anterior?#
La condición para que una dirección produzca descenso en \(f_o\), \(f_o(x^{(k+1)}) < f_o(x^{(k)})\), no es la única para que la secuencia de minimización converja a un mínimo de \(f_o\). El siguiente ejemplo muestra el comportamiento del ejemplo trabajado antes en el plano.
Considérese \(f_o(x) = x^2\), \(x^{(0)} = 2\) y los pasos dados por la secuencia: \((-1)^k(1+2^{-k})\). Entonces:
f_o = lambda x:x**2
n = 10
def minimization_sequence():
for k in range(n):
yield (-1)**k*(1+2**(-k))
t = np.linspace(-2.3, 2.3, 100)
plt.plot(t, f_o(t))
[plt.scatter(s, f_o(s)) for s in minimization_sequence()]
plt.title("Secuencia de minimización que no converge al mínimo de $f_o$")
plt.annotate('$f(x^{(0)})$',(2, f_o(2)),fontsize=12)
plt.annotate('$f(x^{(1)})$',(-1.5, f_o(-1.5)),fontsize=12)
plt.annotate('$f(x^{(2)})$',(1.25, f_o(1.25)),fontsize=12)
plt.show()

para esta secuencia se cumple \(f_o(x^{(k+1)}) < f_o(x^{(k)})\) por lo que es una secuencia de minimización pero no converge tal secuencia pues oscila en los valores \(\approx -1, 1\).
El problema en este caso es que en cada iteración es muy pequeña la reducción que se obtiene en \(f_o\) relativo a la longitud de los pasos. Esto puede arreglarse al requerir que se cumpla una reducción en \(f_o\) al moverse de \(f_o(x^{(k)})\) hacia \(f_o(x^{(k+1)})\) de al menos una cantidad (reducción suficiente).
Comentario
Otra dificultad relacionada con la reducción de \(f_o\) y la longitud de los pasos es la situación en la que los pasos sean muy pequeños relativos a la reducción de \(f_o\). En la implementación por backtracking que se revisa a continuación sólo se soluciona la reducción suficiente de \(f_o\).
Método de búsqueda de línea por backtracking#
En esta sección consideramos \(f = f_o\).
La idea del método de búsqueda de línea por backtracking es moverse de un punto a otro siguiendo una dirección de descenso con un tamaño de paso completo y si tal tamaño no satisface un criterio entonces realizar un backtrack de forma sistemática a lo largo de tal dirección hasta satisfacer el criterio resultando en el tamaño de paso correspondiente.
Descenso suficiente#
Para entender el método de búsqueda de línea por backtracking supóngase que \(f\) tiene una forma siguiente:
Y considérese una función \(g: \mathbb{R} \rightarrow \mathbb{R}\) igual a \(f\) pero restringida al rayo \(x + t\Delta x\), esto es: \(g(t) = f(x+t \Delta x)\) con \(t>0\), \(\Delta x\) dirección de descenso. Lo anterior se visualiza como sigue:
Observación
Obsérvese en el dibujo que \(\nabla f(x) \neq 0\).
Y como \(f\) es continua y diferenciable, \(g\) también lo es y \(g(0)=f(x)\), \(g'(t) = \nabla f(x+t\Delta x)^T \Delta x\). Si graficamos \(g\) se tendría:
En la búsqueda de línea se construyen dos rectas. Una recta es \(g(0) + \alpha g'(0)(t-0)\) con \(\alpha \in (0,\frac{1}{2})\). La otra recta es \(g(0)+g'(0)(t-0)\). Ambas rectas tienen pendiente negativa. Esto se visualiza como sigue:
Se busca \(t^{(k)}\) tal que \(f\) decrezca suficientemente. Lo anterior se establece con la desigualdad:
que se nombra condición de Armijo:
Obsérvese en el dibujo anterior que la región en la que se elegirá \(t^{(k)}\) está a la izquierda de la línea punteada vertical de color verde.
Y visualmente en \(R^3\) se tiene:
Algoritmo: búsqueda de línea por backtracking#
El método depende de dos constantes \(\alpha\) y \(\beta\) con \(\alpha \in (0,\frac{1}{2})\) y \(\beta \in (0,1)\).
Dados \(\Delta x\) dirección de descenso para \(f\) en \(x \in \text{dom}f\), \(\alpha \in (0,\frac{1}{2})\), \(\beta \in (0,1)\).
Asignar t=1.
Mientras \(f(x+t\Delta x) > f(x) + \alpha t \nabla f(x) ^T\Delta x\).
Reducir \(t: t= \beta t\).
Comentarios
La desigualdad de descenso suficiente establece que la reducción debe ser proporcional al tamaño de paso y la derivada direccional \(\nabla f(x)^T \Delta x\).
El backtracking permite tomar tamaños de paso completos, esto es, \(t = 1\).
El valor \(\alpha\) típicamente se elige entre \(.01\) y \(.3\) que indica que se acepta un decrecimiento en el valor de \(f\) entre el \(1 \%\) y el \(30 \%\). La constante \(\beta\) comúnmente se elige entre \(.1\) (que modifica fuertemente \(t\)) y \(.8\) (que realiza una modificación menos drástica de \(t\)).
Aunque la condición de descenso suficiente por sí sola no garantiza que un algoritmo que la utilice realice progreso razonable (pues también hay que añadir una segunda condición para no tomar valores de \(t\) muy pequeños) en la implementación del backtracking puede incluirse que se revise que \(t\) no sea muy pequeño (por ejemplo menor a \(10^{-6}\)) relativo a \(x\), \(\Delta x\) y \(\nabla f(x)\).
Función en Python para el método de backtracking#
def line_search_by_backtracking(f,dir_desc,x,
der_direct, alpha=.15, beta=.5):
"""
Line search that sufficiently decreases f restricted to a ray in the direction dir_desc.
Args:
alpha (float): parameter in line search with backtracking, tipically .15
beta (float): parameter in line search with backtracking, tipically .5
f (lambda expression): definition of function f.
dir_desc (array): descent direction.
x (array): numpy array that holds values where line search will be performed.
der_direct (float): directional derivative of f.
Returns:
t (float): positive number for stepsize along dir_desc that sufficiently decreases f.
"""
t = 1
if alpha > 1/2:
print("alpha must be less than or equal to 1/2")
t = -1
if beta > 1:
print("beta must be less than 1")
t = -1;
if t != -1:
eval1 = f(x+t*dir_desc)
eval2 = f(x) + alpha*t*der_direct
while eval1 > eval2:
t = beta*t
eval1 = f(x+t*dir_desc)
eval2 = f(x)+alpha*t*der_direct
return t
Ejercicio
Realizar \(5\) iteraciones para minimizar la función \(log(e^{x_1^2} + e^{x_2^2})\) del método de descenso en gradiente utilizando búsqueda de línea tomando como punto inicial \((10,1)\) y calcular el error relativo de cada iteración. Para calcular \(x^*\) utilizar cvxpy.
Algoritmo: método general de descenso para problemas UCO#
Dado un punto inicial \(x\) en \(\text{dom}f_o\)
Repetir el siguiente bloque para \(k=0,1,2, \dots\)
Determinar una dirección de descenso \(\Delta x\).
Búsqueda de línea. Elegir un tamaño de paso \(t > 0\).
Hacer la actualización: \(x = x + t\Delta x\).
hasta convergencia (satisfacer criterio de paro).
Comentarios.
El algoritmo termina si \(f_o(x^{(k)})-p^* \leq \epsilon\) con \(\epsilon >0\), esto es, \(x^{(k)}\) es \(\epsilon\)-subóptimo.
El criterio de paro típicamente es de la forma \(||\nabla f_o(x)|| \leq tol\) donde: \(tol\) es una cantidad pequeña y positiva (comúnmente menor o igual a \(10^{-8}\)). También se involucra el número máximo de iteraciones en el criterio de paro.
El paso \(2\) busca reducir \(f_o\) lo suficiente o minimizarla aproximadamente a lo largo de un rayo. La búsqueda de línea por backtracking permite esto.
Preguntas de comprehensión.
1)¿Qué es un método de descenso?
2)Describe los elementos del esquema iterativo de un método de descenso.
3)¿Cómo se obtiene la dirección de Newton en un método de descenso?
4)¿Cómo se obtiene la dirección del gradiente en un método de descenso?
5)¿Qué es un método Cuasi-Newton?
6)¿Cuál es la condición matemática y geométrica que verifica que un paso de búsqueda sea de descenso?
7)¿Qué problemática está resolviendo el método de búsqueda de línea con backtracking en cuanto la reducción que se obtiene en \(f_o\) relativo a la longitud de los pasos?
Referencias:
S. P. Boyd, L. Vandenberghe, Convex Optimization, Cambridge University Press, 2009.
J. Dennis, R. B. Schnabel, Numerical Methods for Unconstrained Optimization and Nonlinear Equations, SIAM, 1996.